
With its new console, Sony has taken the lead in terms of gaming experience thanks to the haptic technologies integrated into its controller.
We decided to do a deep-dive analysis of the DualSense controller haptics within the Playstation 5 ecosystem. This article focus on a teardown of the controller and an analysis of the tactile technologies integrated in.
In the previous article, we presented what Sony designed with the Dualsense: an advanced haptic device integrating a bunch of different haptic technologies, to serve one purpose, providing tools to create more immersive entertaining experiences. Based on that platform, Sony announced the development of a new version of their Playstation VR system, with new controllers integrating similar haptic technology.
In this article, we will analyse the hardware integrated in the Dualsense, more specifically the different actuators, with a focus on the vibrotactile actuators, and the electronics used to drive those pieces of hardware.
How haptic is actuated in the DualSense?
With a design aligning with the standard shape of a console controller and the brand identity of the Sony Playstation 5, it is inside its white, black and blue lines that we find the value brought by the DualSense.

Once opened, the controller shows all of its tightly integrated hardware. Here, we can observe the elegant work Sony’s designers and engineers produced in order to provide the fine piece of hardware the DualSense is.
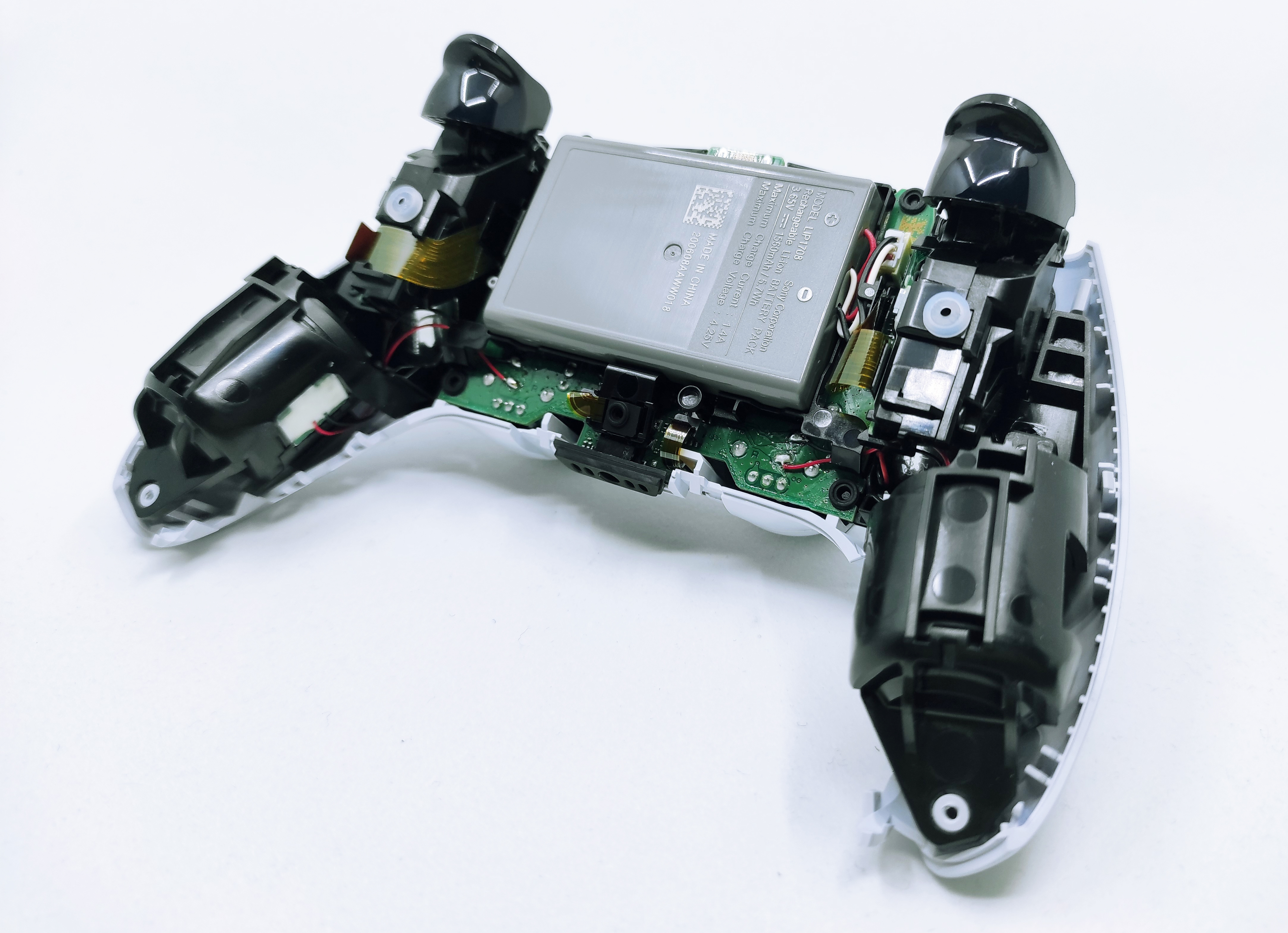
On each side of the controller, there is a combination of a vibrotactile actuator, designed by Foster Electric, and the adaptive trigger. In between, we find the motherboard of the controller, with the battery, two microphones, a speaker and the classic inputs, i.e. two joysticks, a panel of buttons and a trackpad.
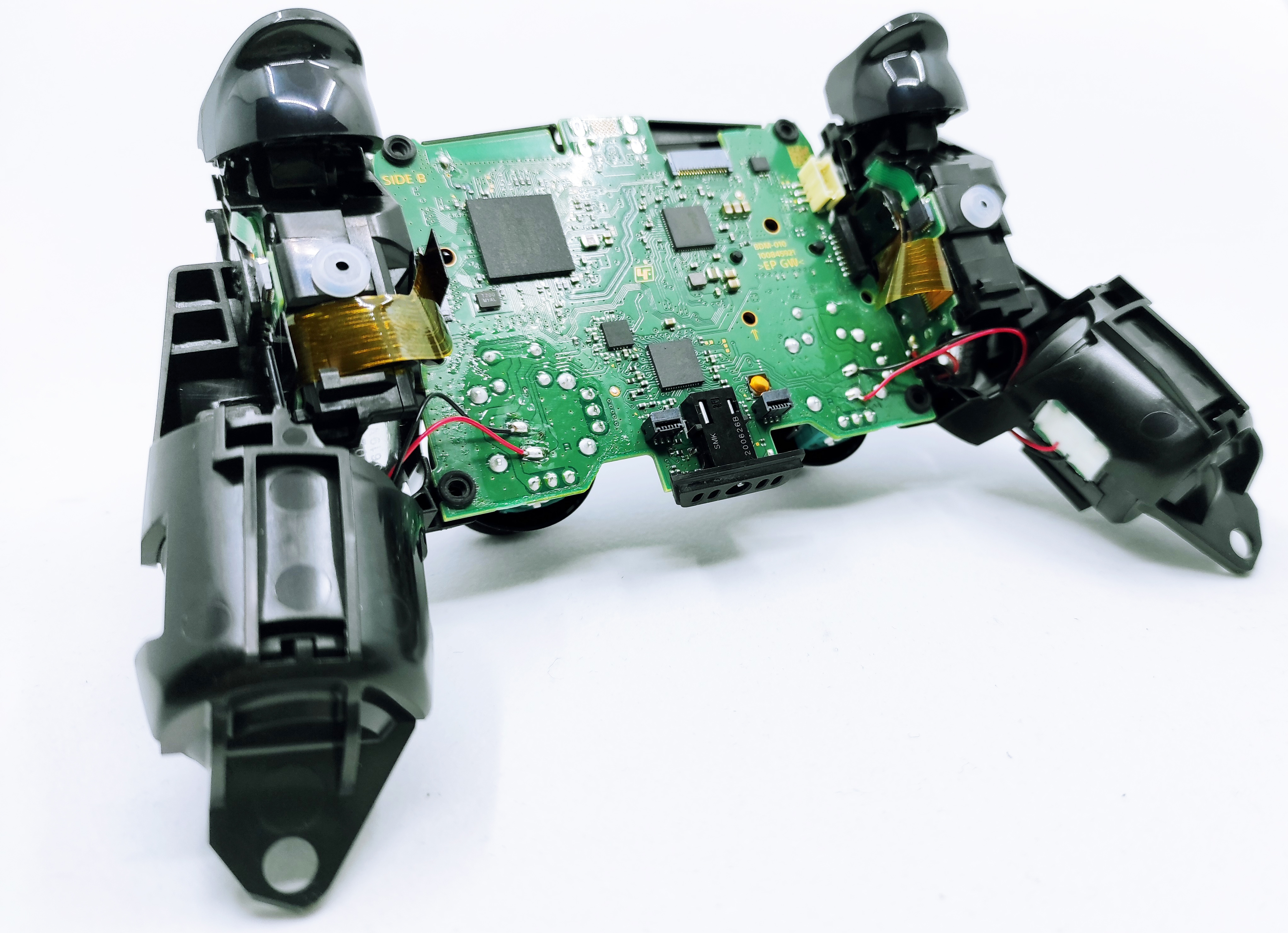
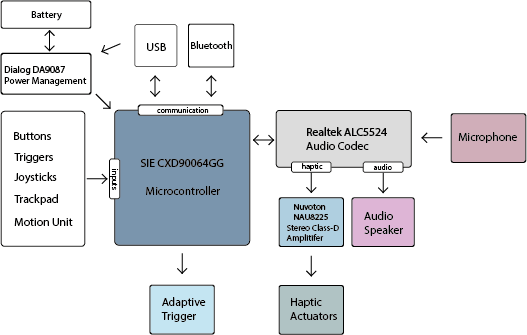
If we look at the printed circuit board, we can see the electronic chips Sony uses in its controller :
- SIE CXD90064GG - Main microcontroller of the DualSense based on an ARM architecture, it is a rebranded Mediatek MT3616 System-in-Package.
- Dialog DA9087 - Power Management integrated circuit.
- Realtek ALC5524 - System-on-Chip designed for audio and voice signal processing.
- Nuvoton NAU8225 - a 3.0W Class-D Audio Stereo amplifier
There’s not much technical datasheets that can be found on those chips, so we can only make assumptions based on the features provided by the system.
Globally, the microcontroller manages all the features of the DualSense and the interfaces to the console, USB high-speed for the wired interface and Bluetooth for the wireless. It delegates the audio-based features to the Realtek chip, meaning the microphones, the speakers and what is interesting to us, the vibrotactile actuators. The signal to be retransmitted to the actuators is amplified by the Nuvoton chip, which drives both of the actuators. As modern vibrotactile actuators have a wide bandwidth, such amplifiers become relevant to control haptic actuators as the control signal is similar to an audio signal.
Let’s now take a look at the source of the force feedback, the new Adaptive Triggers. The trigger appears packaged as a module exposing both the standard trigger and button you can find on a controller, but it integrates additional electronic and mechanical pieces in order to provide force feedback.

You can see that there is a classic DC motor, driven by a H-Bridge, with a solenoid at the tip of it and with plastic gears driven by the motor, the motor moves a part in the path of the trigger, thus enabling different hardness while using it or even pushing the trigger back. With a potentiometer linked to the part in the path of the trigger, they are able to get information on the position of the haptic actuator, simple but efficient.
There’s no rocket science technology in that trigger, but a well designed and engineered hardware enabling more dynamic and interactive input for the users. By modulating the tension applied on the motor within the trigger, the developers could emulate the recoil of a gun by pushing the trigger back at each shot or indicating a varying roughness of a car or a tool by controlling the hardness of the trigger. The possibilities are only limited by the designer's imagination.
On the side of the Adaptive Trigger, the space is occupied by a vibrotactile actuator able to produce HD Haptics vibrations. That actuator is designed and produced by Foster Electric, some models can integrate actuators produced by Minebea Mitsumi.
It is a Linear Resonant Actuator, or Voice Coil Motor, as its behavior implies the linear motion of magnets driven by coils and suspended by elastic parts, like springs or silicone membranes. Such construction induces a resonant component. A HD Haptic actuator looks like a small speaker with a mechanical design aimed to provide a high acceleration at low frequencies. Modern designs like the one Foster provides, or our HapCoil actuators, have the capability to also reproduce a part of the audible bandwidth.
In the DualSense, all the electronics and actuators are tightly packed as while vibrating, any part that could move would create undesired noise which would reduce the overall perceptive quality.
HD Haptic actuators, analysis of the characteristics
While the Dualsense integrates a set of vibrotactile and force feedback actuators, in this part, we present the technology behind a high-definition vibrotactile actuator.
At the beginning of haptics, in order to produce vibrations, engineers designed a quite cheap but powerful actuator with Eccentric Rotary Motors. Those are classic DC motors with an eccentric mass at the tip giving it its vibrating behavior while rotating. Such vibrotactile actuators present a narrow bandwidth in the frequency response. Moreover, the vibration frequency and amplitude are linked to the voltage applied to the motor. Such behavior is enough to provide a feeling of rumbles in devices, but lacks sharpness and limits the design space of tactile rendering.
Since then, the technology evolved and the market now provides a set of vibrotactile actuators with characterics empowering the full range of vibrotactile perception. Voice-coil motors are of those.
With a set of magnets, coils and elastic parts, vibrotactile actuators are able to reproduce low frequency signals with a resonant frequency dependent on the design, often in a range of 60 to 120Hz. As vibrotactile biomechanical sensors are sensitive to acceleration, such actuators focus on producing enough acceleration within the tactile sensitivity range, from 10Hz to 500Hz. The design of voice-coil motors is inspired by the one of speakers, a varying current is driven in the coil to pilot the motion of a moving mass, here the magnet, and is held with an elastic membrane. The signal characteristics driving the core of the actuator tends to be similar to an audio-like signal. Even though the main information of vibrotactile signals is contained on a tighter bandwidth than the one of audio actuators, getting similar characteristics remains interesting, as from the upper tactile range, to the upper audible range, a vibrotactile actuator will naturally filter out the signal in that range, but not cut it perfectly.
Let’s say we sampled our vibrotactile signals at 4 kHz, we’d be able to restitute the main tactile information, considering Nyquist-Shannon sampling theorem. Nonetheless, that one could be altered by the mechanical behavior of the vibrotactile actuator, as that sampling frequency could be also restituted, thus adding undesired harmonics to the rendered stimuli. Hence by using audio-like characteristics of signals for haptic, we avoid such behavior.
Voice-coil motors behavior of the HapCoil One Actuator
The last component of the sense of touch, thermal inputs, is still at research stages as such actuators induce high power consumption and are not that easy to embed in a device. Nonetheless, with the tools we can find today on the market, we are able to hack how the brain works in order to create illusions. By finely orchestrating all the perceptual modalities in a virtual experience, you can express intangible emotions.
Multi-modality : a combination of perceptual actuations
In the design space, you should not omit a part of the human perception in order to realise your goal. To answer both aesthetic and ergonomic functions, all the senses are stimulated, through the colors, the shapes or the materials, etc.
With the last years of technology evolutions, systems became more and more compact and screens went larger. Most of the informatives feedback became transmitted through visual or audible stimulations. To the point where those could be overloaded. In such a state, the information is processed as noise and is not correctly understood, even worse it can become undesired.
Today, with the latest haptic technologies, a balance can be restored in the design of high-technology objects by harmonizing how the information is transmitted to the user. Besides, by blending the design of each perceptual modality, more complex interactions are possible.
If you only consider vibrotactile haptic, a single rendering by itself could be not easily understable. But by layering it to other modalities, in other words, by bringing context to the design, that single haptic rendering could be made felt as an impact, a button, or a gun shot for instance. That is the same story while designing sound effects for a movie, the visual will give the context on the sound, thus a hit on a steel-cable could be used to reproduce the sound of a laser pistol. In the end, it is the temporal synchronisation and masterisation of all the stimuli that will lead the user to understand a specific interaction.
With the right tools, designers will be able to relay information in a more natural way, improving the perceptual link being made with the device the user interacts with.
This article is the second of a series on a deep-dive analysis of the DualSense controller from the Playstation 5 ecosystem. The next one will focus on the haptic stimuli provided by the controller in games and haptic design.


